")
Isi kandungan:
- Pengarang John Day day@howwhatproduce.com.
- Public 2024-01-30 11:12.
- Diubah suai terakhir 2025-01-23 15:01.

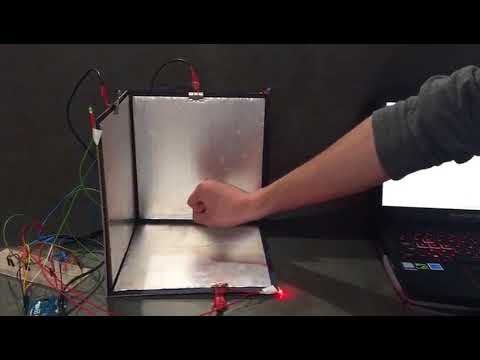

Dalam arahan ini dijelaskan bagaimana pergerakan tangan dapat dilacak dalam ruang 3D dengan menggunakan prinsip penginderaan kapasitif. Dengan menukar jarak antara aluminium foil yang dikenakan dan tangan anda, kapasiti kapasitor akan berbeza. Kaedah ini boleh digunakan sebagai alternatif kelas rendah untuk sistem inersia dan optik untuk mengesan pergerakan di ruang 3D. Dalam prototaip ini, kami menambahkan LED yang akan bersinar ketika objek bergerak terlalu dekat dengan kepingan aluminium foil.
Langkah 1: Alat & Bahan yang Diperlukan
- Perintang 3xm 270k
- Perintang 3x 10k Ohm
- Klip buaya 3x
- 1x LED Merah
- 1x LED Biru
- 1x LED Hijau
- Perintang 3x 220 Ohm
- Pateri
- Panas mengecut
- Kabel perisai
- Arduino Uno
- Kertas aluminium
- kadbod
- Pita
- Semburkan gam
- Papan roti
- Kabel sambungan (panjang berbeza)
Langkah 2: Membina Bingkai




Potong tiga keping kadbod segiempat sama (250x250 mm) dan tiga kepingan aluminium foil (230x230 mm). Sapukan gam semburan ke satu sisi aluminium foil dan sapukan masing-masing pada kepingan kadbod. Dalam prototaip ini kepingan aluminium foil akan berfungsi sebagai sensor kapasitif kami. Oleh itu, pastikan bahawa terdapat cukup ruang antara kerajang aluminium dan sempadan kadbod, jadi tidak akan ada hubungan antara lembaran foil yang berlainan setelah bingkai dipasang. Setelah kerajang dilekatkan pada kadbod sudah tiba masanya untuk memasang tiga keping kadbod menggunakan pita untuk melengkapkan bingkai. Sekali lagi, pastikan tidak ada hubungan antara kepingan aluminium foil yang berlainan.
Langkah 3: Pendawaian Wayar Perisai ke Plat dan Arduino



Penting untuk menggunakan kabel terlindung untuk menghubungkan kerajang ke litar. Menggunakan kabel biasa akan menghasilkan kesan antena dan mengganggu pembacaan sensor anda. Pastikan anda mempunyai 3 kabel terlindung yang panjangnya sekitar 50 cm. Ambil satu kabel, lepaskan wayar, potong wayar pelindung dan gunakan hanya wayar dalaman untuk menyambungkannya dengan menyolder wayar ke klip buaya. Pastikan menggunakan pengecutan haba untuk menutup sambungan pateri. Klip klip buaya ke kerajang aluminium.
Sambungkan semua wayar perisai ke baris positif papan roti anda. Kemudian sambungkan baris positif ini ke sambungan 5V di Arduino anda. Sekarang ambil wayar utama dari kabel perisai, dan sambungkan perintang Ohk 10k dan 220k selari. Sambungkan ini ke port output Arduino anda (kami menggunakan 8, 9, & 10).
Ulangi langkah ini 2 kali lagi untuk satah prototaip yang lain.
Langkah 4: Pendawaian LED




Pateri hujung LED ke wayar panjang sehingga dapat mencapai sudut pelat masing-masing dari papan arduino.
Kami menggunakan pin 2, 3 & 4 sebagai pin output untuk LED kami. Output ini disambungkan ke papan roti dan disambungkan ke kaki positif LED. Kaki negatif LED kemudian disambungkan ke perintang 330 Ohm. Hujung perintang yang lain disambungkan ke tanah papan roti, yang dihubungkan ke tanah Arduino. Ulangi ini untuk semua 3 LED. Dalam prototaip kami, LED biru disambungkan ke satah Y, LED merah ke satah Z dan LED hijau ke satah X. Ketik LED ke pesawat yang sesuai untuk mendapatkan maklum balas langsung semasa menggunakan prototaip.
Sekiranya anda tidak menggunakan papan roti dan anda ingin menyambungkan kabel perisai terus ke Arduino, anda dapat melihat gambar yang dilampirkan untuk gambaran keseluruhan sambungan solder yang bagus. Sambungan terakhir anda akan kelihatan seperti gambaran keseluruhan.
Langkah 5: Pengekodan
Dalam lampiran kami meletakkan kod yang kami gunakan untuk eksperimen ini. Untuk pandangan tambahan, setelah setiap arahan utama diberikan komen, menjelaskan apa yang berlaku dalam kod tersebut. Buka kod dalam perisian Arduino anda di PC anda, dan muat naik ke Arduino anda. Sekiranya anda menggunakan komputer riba, pastikan komputer sedang dicas; jika tidak, prototaip anda tidak akan berfungsi.
Langkah 6: Menggunakan Prototaip
Cara penjejakan gerakan 3D ini sangat sensitif untuk pemboleh ubah di sekitarnya. Oleh itu, pastikan untuk menentukur nilai dalam kod mengikut keadaan anda sendiri. Anda hanya boleh menggunakan monitor bersiri untuk mendapatkan nilai yang tepat. Petua: anda boleh membuat penentukuran sendiri, di mana ia memerlukan nilai rata-rata + 10% semasa menjalankan kod. Dalam video ditunjukkan bagaimana prototaip harus berfungsi dengan betul.
Disyorkan:
Sensasi Gerak Di Bawah Lampu Tempat Tidur: 16 Langkah (dengan Gambar)
")
Motion Sensing Under Lighting Light: Pernah cuba keluar dari tempat tidur dengan tenang pada waktu malam hanya untuk meredah sesuatu dan membangunkan seluruh rumah? Lampu malam penginderaan gerakan yang dipasang secara diam-diam di bawah katil anda memberikan cahaya tahap rendah yang cukup terang untuk memandu anda di sekitar batu bata LEGO yang sesat itu
Penjejakan Gerak Menggunakan MPU-6000 dan Foton Zarah: 4 Langkah

Penjejakan Gerak Menggunakan MPU-6000 dan Foton Partikel: MPU-6000 adalah Sensor Pengesanan Gerak 6-Paksi yang mempunyai akselerometer 3-Paksi dan giroskop 3-Paksi yang tertanam di dalamnya. Sensor ini mampu mengesan kedudukan dan lokasi objek dengan tepat dalam satah 3 dimensi. Ia boleh digunakan
Penjejakan Gerak Menggunakan MPU-6000 dan Arduino Nano: 4 Langkah

Motion Tracking Menggunakan MPU-6000 dan Arduino Nano: MPU-6000 adalah Sensor Motion Tracking 6-Axis yang mempunyai accelerometer 3-Axis dan giroskop 3-Axis yang tertanam di dalamnya. Sensor ini mampu mengesan kedudukan dan lokasi objek dengan tepat dalam satah 3 dimensi. Ia boleh digunakan
Penjejakan Gerak Menggunakan MPU-6000 dan Raspberry Pi: 4 Langkah

Motion Tracking Menggunakan MPU-6000 dan Raspberry Pi: MPU-6000 adalah Sensor Motion Tracking 6-Axis yang mempunyai accelerometer 3-Axis dan giroskop 3-Axis yang tertanam di dalamnya. Sensor ini mampu mengesan kedudukan dan lokasi objek dengan tepat dalam satah 3 dimensi. Ia boleh digunakan
QeMotion - Penjejakan Gerak untuk Setiap Headset !: 5 Langkah (dengan Gambar)
")
QeMotion - Pelacakan Gerak untuk Setiap Headset !: Gambaran keseluruhan: Peranti ini membolehkan anda memanfaatkan pergerakan kepala anda untuk mencetuskan peristiwa pada dasarnya permainan video apa pun. Ia berfungsi dengan mengesan pergerakan kepala anda (atau headset yang berkenaan) dan mencetuskan menekan papan kekunci untuk pergerakan tertentu. Oleh itu, komp