")
Isi kandungan:
- Pengarang John Day day@howwhatproduce.com.
- Public 2024-01-30 11:09.
- Diubah suai terakhir 2025-01-23 15:01.




Motivasi
Saya sangat suka paparan POV (kegigihan penglihatan)! Mereka tidak hanya menarik untuk dilihat tetapi juga merupakan cabaran besar untuk mengembangkannya. Ini adalah tugas yang sangat interdisipliner. Anda memerlukan banyak kemahiran: mekanikal, elektronik, pengaturcaraan dan sebagainya!
Saya selalu mahu membina sendiri dan menjadikannya sebesar dan seboleh mungkin. Setahun yang lalu saya berjaya! Itu banyak kerja dan sangat rumit untuk dilakukan. Saya suka cabaran seperti ini. Jadi ia menyeronokkan;-)
Sekarang saya juga mahu anda membina sendiri. Anda boleh mengambil ini sebagai panduan untuk mengembangkan sendiri atau hanya mengikuti arahan untuk mendapatkan salinan paparan POV saya. Saya akan cuba menunjukkan semua cabaran yang harus saya atasi untuk membuat saya.
Saya mengulangi reka bentuk saya untuk menjadikannya semudah mungkin untuk dibina semula. Tidak ada komponen SMT dan semuanya mesti disolder oleh pemula. Jangan salah faham, masih merupakan cabaran yang sangat besar untuk menyatukan semuanya. Tetapi ia mesti dilakukan!
PERINGATAN: Projek ini mengandungi LED yang dikemas kini dengan kelajuan tinggi dan berpotensi mencetuskan kejang bagi orang yang mempunyai epilepsi sensitif fotosensif
Bagaimanakah ia berfungsi?
Di sini anda dapat membaca bagaimana paparan POV berfungsi secara umum.
Mula-mula kita memerlukan sumber yang mengalirkan isyarat video. Dalam reka bentuk asal saya melakukannya melalui WIFI. Saya menulis program untuk menangkap skrin komputer dan mengirim data ini ke ESP8266 melalui WIFI. Masalah pendekatan ini adalah bahawa ESP8266 terlalu perlahan dan lebar jalur WIFI cukup untuk 16 FPS. Jadi sekarang kita menggunakan ESP32. Saya berfikir bahawa semua masalah telah diperbaiki, tetapi ternyata ESP32 juga tidak menawarkan lebar jalur lebih daripada WIFI daripada ESP8266. ESP32 mempunyai kekuatan komputasi yang cukup untuk menyahkod aliran video. Oleh itu, saya akhirnya menghantar gambar JPEG melalui WIFI ke ESP32. Oleh itu, ESP32 menghoskan laman web. Di laman web ini anda boleh memilih gambar atau video dan laman web kemudian akan mengalirkan JPEG ke ESP32. Penyahkodan JPEG memerlukan banyak memori sehingga kita mempunyai masalah di sana juga. Tetapi ia berfungsi buat masa ini. Mungkin saya akan mencari penyelesaian yang lebih baik kemudian.
Seterusnya kita perlu mengawal LED itu sendiri. Untuk berjaya, kita perlu mengetahui kedudukan LED yang tepat setiap saat. Oleh itu, saya menambah sensor kesan Hall. Setiap putaran melewati magnet dan dengan itu memungkinkan pengesanan. Kemudian kami mengukur masa putaran. Kami menganggap bahawa putaran seterusnya akan mengambil masa yang sama. Oleh itu kita dapat mengira kedudukan kita. Proses ini diulang berulang kali. Untuk mengawal LED kami menggunakan FPGA. Kita juga boleh menggunakan mikropemproses tetapi mungkin terlalu lambat. LED paling luar perlu disegarkan sekitar 10.000 kali sesaat. FPGA dengan mudah melakukan tugas dan akan melakukannya dengan sedikit kegelisahan.
Sekiranya LED perlu kerap dikemas kini, kita juga memerlukan LED yang cepat. Dalam reka bentuk asal saya menggunakan LED APA102. Mereka mempunyai kadar penyegaran sekitar 20KHz. Saya cuba mendapatkan jalur LED dengan LED ini tetapi penjual dalam talian menghantar saya SK9822 dan akan memberitahu saya bahawa ia sama (berlaku dua kali …) Oleh itu, kami akan menggunakan SK9822. Mereka hanya mempunyai kadar penyegaran 4.7kHz, tetapi semoga ini cukup. Mereka juga mempunyai protokol yang sedikit berbeza. Sedar sahaja. Oleh itu, ESP32 mendorong bingkai gambar ke FPGA. FPGA kemudian mengawal LED.
Kini LED hanya perlu dipusingkan. Oleh itu kami menggunakan motor DC. Motor ini dikawal melalui isyarat PWM dari ESP8266. ESP8266 juga disambungkan melalui WIFI ke ESP32. Oleh itu, kita hanya memerlukan satu sensor untuk mengukur kelajuan putaran. Dalam reka bentuk asal saya menggunakan dua.
Lebih banyak Maklumat mengenai sistem boleh didapati dalam video saya mengenai reka bentuk asal.
Alat
Saya menggunakan Alat berikut:
- Pencetak 3D
- Pateri besi
- Gam panas
- Lem super
- Kabel USB Mikro
- Gunting
- Bor + gerudi kayu 3 4 8 dan 12mm
- Pemutar skru
- Tang rata
- Pemotong sisi
- Pelucut wayar
- Bekalan cat
- Kertas pasir
Pesanan
Saya membuka kedai TINDIE. Oleh itu, anda boleh membeli kit jika anda mahu dan membantu saya membuat lebih banyak projek seperti ini;-)
OSH
Seperti biasa semua yang anda lihat di sini diterbitkan sebagai sumber terbuka.
Kemas kini
Terdapat beberapa perkara yang ingin saya perbaiki pada masa akan datang:
-
Resolusi warna yang lebih tinggi dari 12 bit hingga 24 bit => oleh itu kita memerlukan FPGA dengan lebih banyak RAM =>
Cmod A7, mereka serasi dengan pin:-)
- ESP32 dengan PSRAM untuk mengelakkan masalah ingatan
- Selesaikan masalah berus…
Bekalan
Bahagian yang dibuat khas
Anda perlu memesannya atau memesan kit dari saya!
1 * PCB Utama (fail gerber berada di bawah folder gerber main.zip)
1 * Motor Driver PCB (fail gerber berada di bawah folder gerber motor.zip)
4 * Corners 3D 1 Print (fail stl ada di bawah folder 3D corner.stl)
1 * Pemegang PCB Utama 3D 3 Print (fail stl berada di bawah folder pemegang 3D1.stl, pemegang2.stl, pemegang3.stl)
1 * Brush Holder 3D 2 Print (fail stl berada di bawah folder 3D brush1.stl dan brush2.stl)
Bahagian Piawai
Hati-hati, beberapa pautan merangkumi 10 atau bahkan 100 keping pakej.
Jalur LED 1m * SK9822 dengan 144 LED / m
1 * Cmod S6 FPGA
1 * Geekcreit 30 Pin ESP32 Pembangunan
1 * Geekcreit D1 mini V2.2.0 ESP8266
4 * 74HCT04
5 * DC-DC 5V 4A
1 * Motor DC 775
44 * 100nf 50V
9 * 220uf 16V
10 * Neodymium Magnet 10mmx2mm
1 * Sensor kesan dewan
2 * Carbon Bruches Dremel 4000
2 * Berus Karbon Motor
2 * Galas 6803ZZ
2 * Pemasangan Motor 775
2 * Jack DC 5.5 x 2.1mm
1 * Bekalan Kuasa
1 * Butang 8mm
2 * XT30PB Palam PCB Lelaki dan Wanita
2 * Kabel Lelaki dan Wanita Palam XT30
Perintang 2 * 130Ohm 1 / 4W
2 * MOSFET IRF3708PBF
2 * 1N5400
1 * Header Pin Baris Tunggal
1 * Header Wanita
1 * Kabel 30AWG
1 * Kabel 22AWG
Stor peralatan
1 * MDF 500mm x 500mm x 10mm
1 * MDF 100mm x 500mm x 10mm
4 * MDF 200mm x 510mm x 10mm
1 * kaca akrilik 500mm x 500mm x 2mm
12 * Sudut Logam 40mm x 40mm x 40mm
40 * Skru kayu 3mm x 10mm
6 * M3 spacer 12 mm
Skru M3 dan M4
3m * Kabel 2.5mm2 wayar tunggal / kaku
Cat hitam untuk MDF Wood
Masa Binaan: ~ 10 jam
Kos bina: ~ 300 €
Langkah 1: Muat turun Fail

Untuk memulakan, kita perlu memuat turun semua yang diperlukan untuk projek ini.
Pergi ke halaman pelepasan repositori di sini.
Kemudian muat turun Release.zip dari keluaran terakhir dan bongkar pada komputer anda.
Setiap kali saya merujuk kepada fail dalam arahan ini, anda akan menjumpainya di sana;-)
Langkah 2: Firmware Program
Langkah 2.1: Program FPGA
Untuk memprogram FPGA, kita perlu memasang perisian dari xilinx:
Untuk Windows 10, anda perlu memasang: ISE Design Suite untuk Windows 10 (~ 7GB)
Untuk Windows 7 atau XP, anda boleh memasang: Alat Makmal (~ 1GB)
Setelah memasang Open ISE iMPACT dan klik "Tidak" jika ditanya dan juga "Batal" untuk borang projek baru. Sambungkan FPGA Board Cmod S6 dan tunggu pemacu dipasang. Klik dua kali pada imbasan sempadan. Kemudian klik kanan pada tetingkap baru dan pilih "Initialize Chain". Klik "Tidak" sekali lagi dan tutup borang baru. Sekarang anda akan melihat simbol "SPI / BPI", klik dua kali padanya. Pilih fail "SPIFlash.mcs". Dalam bentuk baru pilih "SPI PROM" dan "S25FL128S" dan Lebar Data "4". Klik "OK". Kemudian klik sekali pada simbol "FLASH" sekali lagi. Ia mesti berwarna hijau sekarang. Kemudian tekan "Program". Klik "OK" pada borang baru dan tunggu. Ini boleh mengambil masa beberapa minit.
Syabas, FPGA sudah siap;-) Anda boleh mencabutnya lagi!
Langkah 2.2: Program ESP32
Pasang inti esp32 pada Arduino ID, anda boleh mengikuti tutorial ini. V1.0.2 disyorkan.
Perpustakaan yang diperlukan:
- AutoPID oleh Ryan Downing V1.0.3 (boleh dipasang melalui pengurus perpustakaan)
- ArduinoWebsockets oleh Gil Maimon, diubah suai oleh saya (muat turun fail zip dan pasangkannya)
Buka fail povdisplay.ino dalam folder povdisplay.
Pilih di bawah papan alatan: "DOIT ESP32 DEVKIT V1". Tinggalkan tetapan lain sebagaimana adanya.
Sambungkan papan esp32 melalui USB dan muat turun program.
Langkah 2.3: Program ESP8266
Pasang teras ESP8266 pada Arduino ID, anda boleh mengikuti tutorial ini.
Perpustakaan tidak diperlukan!
Buka fail motordrive.ino di folder motordrive.
Pilih di bawah Papan Alat: "Modul ESP8266 Generik". Tinggalkan tetapan lain sebagaimana adanya.
Sambungkan papan esp8266 melalui USB dan muat turun program.
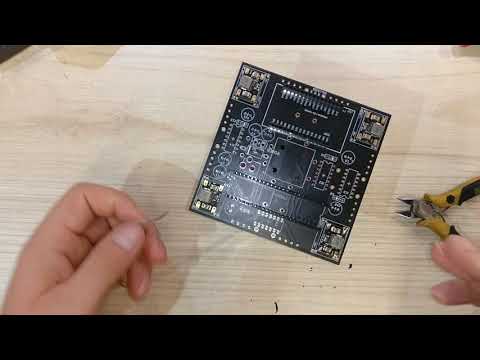
Langkah 3: Pateri PCB




LANGKAH 3.1 Pemacu motor pemateri PCB
Komponen berikut disolder:
-
WEMOS1 (Geekcreit D1 mini V2.2.0 ESP8266)
- Pateri header pin ke papan WEMOS
- Selesaikan Header Wanita di PCB
-
DCDC (DC-DC 5V 4A)
- Gunakan 4 pin membentuk header pin dan pateri penukar DC-DC terus ke papan
- Berhati-hati dengan orientasi, ia harus sesuai dengan layar sutera
- CN1 (Jack DC 5.5 x 2.1mm)
-
1N5400
Berhati-hati dengan orientasi, garis putih pada diod mesti berada di sisi yang sama dengan garis di layar sutera
-
220u (220uf 16V)
Berhati-hati dengan orientasi, garis putih mesti berada di sisi bertentangan plus pada skrin sutera
- R1 dan R1 (Perintang 130Ohm 1 / 4W)
-
Q1 dan Q2 (MOSFET IRF3708PBF)
Berhati-hati dengan orientasi, bahagian belakang logam mesti berada di sisi dengan garis tebal di skrin sutera
-
MOTOR (XT30PB Plug Perempuan PCB)
Berhati-hati dengan orientasi, hujung bulat mestilah di sebelah yang bertanda pada layar sutera
-
LEDS dan TASTER (XT30PB Plug Male PCB)
Berhati-hati dengan orientasi, hujung bulat mestilah di sebelah yang bertanda pada layar sutera
LANGKAH 3.2 Solder PCB utama
Komponen berikut disolder:
-
CMODS6 (Cmod S6 FPGA)
Harus ada header pin disertakan. Selesaikannya di PCB
-
ESP (Geekcreit 30 Pin ESP32 Pembangunan)
Gunakan Header Wanita dan pateri pada PCB
-
DCDC1 - DCDC4 (DC-DC 5V 4A)
- Gunakan 4 pin dari header pin dan pateri penukar DC-DC terus ke papan
- Berhati-hati dengan orientasi, ia harus sesuai dengan layar sutera
- POWER_TEST (Jack Jack 5.5 x 2.1mm)
-
D1 (1N5400)
Berhati-hati dengan orientasi, garis putih pada diod mesti berada di sisi yang sama dengan garis di skrin sutera
-
POWER (XT30PB Plug Perempuan PCB)
Berhati-hati dengan orientasi, hujung bulat mestilah di sebelah yang bertanda pada layar sutera
-
C1, C3, C4, C6, C7, C9, C10, C11 (220uf 16V)
Berhati-hati dengan orientasi, garis putih pada kapasitor mesti berada di sisi bertentangan tambah pada skrin sutera
- C2, C5, C8, C12 (100nf 50V)
-
IC1 - IC4 (74HCT04)
Hati-hati untuk menyelaraskan potongan IC dengan tanda pada skrin sutera
LANGKAH 3.3 Lem panas
PCB utama akan berpusing dengan sangat pantas. Oleh itu, kita perlu merekatkan kapasitor (C1, C3, C4, C6, C7, C9, C10, C11) ke PCB untuk mengelakkan masalah. Hanya gunakan gam panas untuk itu.
Langkah 4: Sediakan Jalur

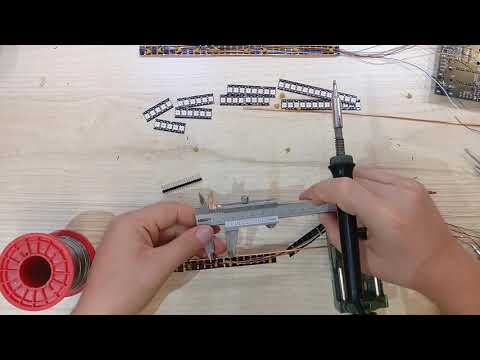



LANGKAH 4.1 Potong jalur menjadi beberapa bahagian
Tanggalkan pelindung air dengan gunting.
Kami memerlukan empat sayap dan setiap sayap mengandungi empat kumpulan. One WING istimewa, ia mempunyai satu LED lebih banyak daripada yang lain.
WING1:
- LED G1: 5 (kumpulan paling luar)
- LED G2: 6
- LED G3: 8
- G4: 14 LED
WING2 - WING4:
- LED G1: 5 (kumpulan paling luar)
- LED G2: 6
- LED G3: 8
- G4: 13 LED
Oleh itu, kami memerlukan 129 LED dan jalur kami mempunyai 144 jadi kami mempunyai toleransi untuk pemotongan yang salah;-) Dalam keadaan terburuk, anda boleh menyelesaikan pemotongan.
Potong sepusat mungkin di antara LED.
LANGKAH 4.2 Kabel solder ke jalur LED
Pada setiap segmen jalur LED solder dua wayar 30AWG pada jam dan pin data. Ini adalah dua pin di tengah. Berhati-hati untuk memasangkannya pada input jalur LED. Biasanya, anak panah menunjukkan arah aliran data. Kabelnya hendaklah sepanjang setengah meter
Potong segala-galanya dari sisi lain dari stripto, elakkan jarak antara data dan pin jam dari kumpulan yang berbeza ketika kita menyatukan WING.
LANGKAH 4.3 Kapasitor pateri
Pada setiap kumpulan solder dua kapasitor (100nf 50V) di bahagian belakang segmen jalur LED pada setiap hujungnya. Untuk G4 juga solder satu di tengah. Kabel harus berada di bawah kapasitor untuk meninggalkan sedikit ruang tetapi tidak terlalu banyak.
LANGKAH 4.4 Satukan sayap
Untuk setiap WING memimpin wayar dari G1 hingga G2 dan kemudian wayar ini melalui G3 dan sama dengan G4.
LANGKAH 4.4 Menyatukan kumpulan bersama
Sekarang kita memerlukan kabel tembaga (kabel 2.5mm2 single wire / kaku). Potong dalam lapan keping sekitar ~ 30cm panjang. Tanggalkan penebat semua wayar. Luruskan kabel sebanyak mungkin. Anda boleh memasang satu hujung pada penjepit skru dan memegang ujungnya dengan tang rata dan kemudian memukul tang dengan tukul.
Betulkan kabel di satu sisi untuk menjadikannya lebih mudah. Kemudian pateri kumpulan pertama kepadanya. Sejajarkan segmen jalur LED dengan kabel dan pateri pada satu sisi ke dua kapasitor. Kabel harus diletakkan rata pada jalur LED. Teruskan dengan kumpulan seterusnya. Hati-hati bahawa jarak antara dua kumpulan LED juga 7mm. Pada akhirnya semua LED harus mempunyai jurang yang sama di antara mereka. Teruskan dengan dua kumpulan yang lain. Pada kumpulan terakhir pateri ketiga kapasitor ke wayar.
Kemudian potong kabel di hujungnya. Teruskan dengan kabel lain di bahagian lain jalur.
Kini WING pertama selesai! Lakukan perkara yang sama untuk tiga Sayap yang lain.
LANGKAH 4.5 Bengkokkan kapasitor
Bengkokkan semua untuk menjadikan helai nipis.
Langkah 5: Selesaikan Jalur pada PCB Utama




LANGKAH 5.1 Periksa polarisasi
Mula-mula kita perlu mengetahui polarisasi jalur LED. Dengan kata lain: Dimana 5V dan ground relatif dengan PCB. Ini benar-benar bergantung pada jalur LED yang anda miliki dan boleh digunakan.
Pegang satu WING ke PCB utama. Anak panah pada jalur LED mesti menunjuk ke tengah PCB. Sekarang perhatikan sama ada 5V berada di bahagian DATA atau JAM pin.
Sekiranya 5V berada di sisi DATA, anda bagus dan anda boleh menggunakan tembaga 2.5mm2 untuk menyolder jalur LED terus ke PCB.
Sekiranya tidak, anda perlu menggunakan kabel 22AWG untuk melintasi kedua sisi. Oleh itu, pateri kabel ke jalur LED dan lintasi kiri dan kanan dan pasangkannya ke PCB.
LANGKAH 5.2 Kabel solder 2.5 mm2
Gunakan sisa kabel tembaga 2.5 mm2 dan lepaskan semua. Selesaikannya di bahagian atas PCB. Potong wayar yang dipateri pada ketinggian yang sama sekitar 1cm.
LANGKAH 5.3 Memateri sayap pertama
Gunakan WING yang lebih panjang dan letakkan di PCB (LED1) seperti yang ditunjukkan pada skrin sutera. Pateri pada wayar 2.5 mm2. Buat sambungan yang sangat kuat, ini akan menyebabkan banyak daya semasa putaran! Kemudian sambungkan kabel untuk Data Kumpulan 1 hingga G1 dan Jam G1.
Jangan lupa untuk menyambungkan sambungan kuasa seperti yang dijelaskan di atas.
Sambungkan ESP32 dan FPGA (48 dan 1 berada di sebelah yang ditandai) dan hidupkan papan dengan bekalan kuasa.
LED paling luar akan berkelip biru sekarang (boleh mengambil masa sehingga 40 saat untuk melakukannya). Sekiranya tidak, periksa sama ada anda menyambungkan CLOCK dan DATA dengan cara yang betul.
LANGKAH 5.4 Sensor kesan dewan
Memasukkan kepala Pin Wanita (dengan tiga pin) ke Dewan. Nanti kita akan sambungkan sensornya.
Pateri sensor (Sensor kesan Hall) ke header pin lelaki. Pautan dengan senor dan header pin hendaklah sekitar 25mm.
LANGKAH 5.5 Teruskan dengan WINGS yang lain
Untuk LED2 - LEDs4 == WING2 - WING4 melakukan proses yang sama seperti dengan WING1.
Dari semasa ke semasa hidupkan PCB dan periksa sama ada semuanya berkelip. Corak bermula dengan led paling luar dan masuk ke dalam dan bermula semula.
LANGKAH 5.6 Imbangan
Cuba mengimbangkan PCB utama di tengah dengan objek runcing. Sekiranya satu sisi lebih berat, cuba tambahkan pateri ke sisi lain. Tidak semestinya sempurna, tetapi terlalu banyak ketidakseimbangan kemudian akan menghasilkan banyak getaran semasa operasi, yang dapat menyebabkan masalah mekanikal.
Langkah 6: Cat Pertama

Langkah 6.1: Latih tubi
Kita perlu menggerudi beberapa lubang:
Di papan MDF 500 * 500 kita memerlukan dua lubang. Lihat fail drill_wood_500_500.pdf dan gerudi lubang mengikut rancangannya.
Di papan MDF 500 * 100, kita memerlukan banyak lubang. Oleh itu, cetak fail drill_wood_500_100_A4.pdf dan sejajarkan pada papan. Hanya gerudi di mana lubang ditandakan di atas kertas.
Langkah 6.2: Cat
Warnakan satu sisi setiap kayu. Untuk papan MDF 500 x 500 adalah bahagian yang anda jalankan.
Warnakan kedua-dua sisi kayu 100x500.
Anda juga boleh melukis sudut logam hitam. Ini akan kelihatan lebih baik;-)
Selebihnya kita akan dicat apabila kita mengumpulkan semuanya (bahagian luar kotak).
Langkah 7: Pemasangan Mekanikal

Langkah 7.1 Pasang PCB Pemacu Motor
PCB dipasang pada papan MDF 100 x 500. Gunakan spacer (M3 spacer 12 mm) dan beberapa skru dan mur m3.
Langkah 7.2 Pasang kurungan
Pasang dua pendakap (Motor Mount 775) pada Papan MDF 100 x500 dengan skru M4.
Langkah 7.3 Sediakan Pemegang
Kedua-dua penghad (Bearing 6803ZZ) perlu dilumpuhkan. Kami hanya memerlukan dua cincin luar daripadanya.
Kabel solder 22AWG pada setiap gelang. Satu hitam dan satu merah.
Ambil bahagian yang dicetak Holder 3D dan pasangkannya.
Letakkan semua tujuh kacang M3 di lubang masing-masing dan geser cincin dengan wayar merah terlebih dahulu pada pemegangnya, kemudian spacer dan kemudian cincin dengan wayar hitam. Tambahkan bahagian ketiga di atas dan masukkan skru.
Potong kedua wayar pada jarak 2 cm dan pateri jek (XT30 Plug Male Cable) padanya. Kabel hitam menuju ke bahagian curfed.
Langkah 7.4 Pasang Motor
Skru motor (Motor DC 775) ke pelekap motor di tengah papan MDF 100 x500.
Pasang pemegang pada motor dan pasangkannya dengan ketat.
Langkah 7.5 Pasang Berus
Saya merancang untuk menggunakan berus Dremel (Carbon Brushes Dremel 4000). Kita memerlukan penggunaan arang batu yang lain (Motor Carbon Brushes) kerana arang batu untuk berus Dremel mempunyai ketahanan yang terlalu tinggi. Saya terlepas pandang dalam proses pembangunan. Oleh itu, kami menggunakan berus motor dan memasangnya dengan ukuran berus dremel.
Potong wayar dari berus motor pada jarak 5 mm dari arang batu.
Kemudian kami menggunakan kertas pasir untuk mengurangkan arang batu ke dimensi berikut: 8.4 x 6.3 x 4.8 mm
Satu sisi berus motor adalah 6.1 mm, jadi kita hanya perlu mencampurkan dua sisi.
Anda boleh mencuba jika meluncur dengan mudah di pemegang berus, maka tidak mengapa.
Cuba juga mencantumkan lekukan di bahagian atas untuk memperbaiki sambungan ke gelang logam.
Pateri wayar 22AWG di arang batu untuk kedua arang batu. Gunakan wayar merah dan hitam. Masukkan spring dari berus dremel.
Masukkan berus di pemegang berus. Berus dengan wayar merah masuk ke bahagian atas. Bahagian atas pemegang sedikit lebih tebal. Berhati-hati agar kedua-dua mata air itu tidak saling bersentuhan.
Pasang pemegang ke pangkal dengan mur dan skru m3.
Pasang pangkal pemegang berus ke pelekap motor yang kuat. Gunakan skru dan mur M4 yang disertakan dengan pendakap.
Motor harus dapat berputar dengan bebas.
Arahkan dua wayar di antara dua pendakap.
Potong kedua-dua wayar dengan panjang sehingga mereka dapat mencapai PCB dan memateri jek (XT30 Plug Male Cable) padanya. Kabel hitam menuju ke bahagian melengkung.
Pateri dua wayar 22AWG ke motor dan potong pada jarak jauh untuk mencapai PCB dengan mudah dan pasangkan jek (kabel wanita plug XT30) ke atasnya. Kabel hitam menuju ke bahagian melengkung.
Langkah 8: Selesaikan
Disyorkan:
Kaca / Bantuan Google Poor Man untuk Mereka yang Menglihat Terowong: 5 Langkah (dengan Gambar)
")
Kaca / Bantuan Google Poor Man untuk Mereka yang Terowong Visi: Abstrak: Projek ini mengalirkan video langsung dari kamera mata ikan ke paparan kepala yang boleh dipakai. Hasilnya adalah bidang pandangan yang lebih luas dalam area yang lebih kecil (paparannya sebanding dengan layar 4 " 12 " dari mata anda dan output pada 720
Sistem Semua dalam Satu Arked: 12 Langkah (dengan Gambar)
")
All in One Arcade System: Saya telah membina kayu bedik arcade sebelum ini dan sangat besar (60x30x12 sentimeter untuk 2 pemain), juga sukar digunakan kerana anda memerlukan PC dengan semua emulasi yang siap dimainkan, dan lain-lain. Sehingga satu akhirnya disimpan di suatu tempat yang saya tidak ingat
Elektronik Semua Musim, Semua Cuti, Subang LED: 8 Langkah (dengan Gambar)
")
Elektronik Semua Musim, Semua Cuti, Anting-anting LED: OK, jadi kami akan membuat anting-anting yang cukup maju. Ini BUKAN projek pemula, dan saya mengesyorkan mereka yang ingin meneruskannya, mulakan dengan projek yang lebih kecil dan gunakan kemahiran anda sehingga ini. Jadi pertama .. Perkara yang kita perlukan. (BAHAGIAN) (1) L
Pengurus Kata Laluan, Typer, Makro, Muatan Semua dalam SATU !: 11 Langkah (dengan Gambar)
")
Password Manager, Typer, Macro, Payload … Semua dalam SATU !: PERHATIAN SILA: Sekiranya anda menghadapi masalah dengan pembuatan peranti ini (pcb, solder atau lain-lain) sila hantarkan saya mesej peribadi di sini atau e-mel ke davidex720@gmail.com. Saya dengan senang hati akan menghantar salah satu pcbs atau peranti yang sudah saya hasilkan
Kotak Cahaya Dilipat untuk Mereka yang kekurangan ruang dan wang tunai: 12 Langkah (dengan Gambar)
")
Kotak Cahaya yang Dapat Dilipat untuk Mereka yang kekurangan ruang dan wang tunai: Saya memutuskan untuk menyahut cabaran untuk mewujudkan kotak cahaya yang dapat dilipat untuk orang yang kekurangan ruang dan juga wang tunai. Masalah yang saya dapati dengan sebilangan besar kotak cahaya teras buih yang berpatutan ialah setiap kali anda mahu mengambilnya