")
Isi kandungan:
- Langkah 1: Bagaimana Dos Ia Berfungsi
- Langkah 2: Perhatikan Sebelum Bermula
- Langkah 3: Kumpulkan Semua Bahan
- Langkah 4: Dimensi Variuos
- Langkah 5: Membuat Badan
- Langkah 6: Pemasangan Penggerak dan Fabrikasi Plat
- Langkah 7: Manupalasi Karakteristik Gelombang
- Langkah 8: Sambungan dan Program Elektronik
- Langkah 9: Mengawal Penggerak oleh Program Berdasarkan Menu
- Langkah 10: Cara Mengendalikan Tangki Gelombang
- Pengarang John Day day@howwhatproduce.com.
- Public 2024-01-30 11:10.
- Diubah suai terakhir 2025-01-23 15:01.



Tangki gelombang adalah persediaan makmal untuk memerhatikan tingkah laku gelombang permukaan. Tangki gelombang khas adalah kotak yang berisi cecair, biasanya air, meninggalkan ruang terbuka atau penuh udara di atasnya. Di satu hujung tangki penggerak menghasilkan gelombang; hujung yang lain biasanya mempunyai permukaan yang menyerap gelombang.
Biasanya tangki ini memerlukan banyak wang, jadi saya cuba membuat penyelesaian yang sangat murah untuk pelajar yang ingin menggunakan tangki untuk menguji projek mereka.
Langkah 1: Bagaimana Dos Ia Berfungsi
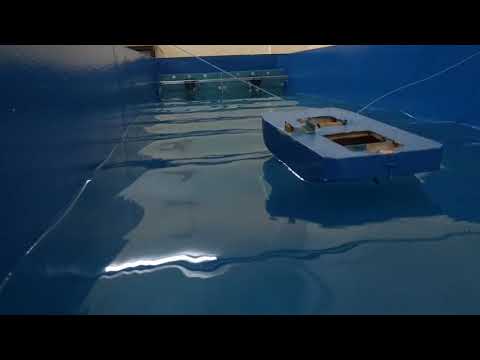
Oleh itu, projek ini terdiri daripada dua penggerak yang dibuat menggunakan penyemperitan aluminium slot-v.
Motor stepper disambungkan ke setiap penggerak dan kedua-dua motor dikawal oleh pemacu motor stepper yang sama sehingga tidak ada ketinggalan.
Arduino digunakan untuk mengawal pemandu motor. Program berdasarkan menu digunakan untuk memberi input kepada arduion yang disambungkan melalui komputer. Plat penggerak dipasang pada gantri slot-v yang akan pergi dan balik sebaik sahaja motor dimulakan dan pergerakan plat belakang dan belakang ini menghasilkan gelombang di dalam tangki. Ketinggian gelombang dan panjang gelombang dapat diubah dengan mengubah kelajuan motor melalui arduino.
Langkah 2: Perhatikan Sebelum Bermula

Saya tidak merangkumi sebahagian besar perkara kecil bagaimana menggunakan arduino atau bagaimana melakukan pengelasan agar tutorial ini tetap kecil dan mudah difahami. Sebilangan besar perkara yang hilang akan dihapus dalam gambar dan video. Sila hantarkan pesanan saya sekiranya terdapat masalah atau pertanyaan mengenai projek tersebut.
Langkah 3: Kumpulkan Semua Bahan
- Contoller mikro Arduino
- 2 * Motor stepper (tork 2.8 kgcm per motor)
- 1 * Pemandu motor Stepper
- Sistem gantri slot 2 * V
- Plat keluli atau besi untuk badan tangki
- L-stiffeners untuk menyokong badan
- Lembaran gentian atau plastik untuk membuat plat penggerak
- Kabel bekalan kuasa DC 48 volt
Saya belum memasukkan bahan untuk v-slot gantry kerana senarai akan sangat besar maka hanya google v-slot anda akan mendapat banyak video mengenai cara memasangnya saya menggunakan penyemperitan aluminium 2040. Kapasiti motor dan kapasiti bekalan kuasa akan berubah jika anda ingin membawa lebih banyak beban.
Dimensi tangki
Panjang 5.50 m
Lebar 1.07 m
Kedalaman 0.50 m
Langkah 4: Dimensi Variuos



Untuk mempermudah dan tutorial menjadi lebih pendek, saya telah mengambil gambar komponen yang berbeza dengan skala sehingga anda dapat melihat ukurannya.
Langkah 5: Membuat Badan




Badan dibuat dengan kepingan besi tuang setebal 3 mm.
Lebar tangki ialah 1.10 meter, panjang 5 meter dan tinggi 0.5 meter.
Badan tangki terdiri daripada keluli ringan dengan pengeras di sekelilingnya jika perlu. Plat keluli ringan dibengkokkan dan dipotong menjadi pelbagai bahagian mengikut dimensi tangki. Bahagian-bahagian ini kemudian didirikan dengan menyatukannya. Penguat juga dikimpal bersama untuk menjadikan strukturnya lebih kuat.
Plat pertama dibengkokkan ke ukuran yang dikehendaki di pelbagai bahagian dan kemudian bahagian-bahagian ini dikimpal bersama untuk mendirikan badan. Stiffeners ditambahkan sebagai dimensi stiffeners sokongan ditunjukkan dalam gambar
Langkah 6: Pemasangan Penggerak dan Fabrikasi Plat



penggerak dibuat menggunakan sistem slot-v. Ini sangat murah dan senang dibina, anda boleh google secara dalam talian bagaimana memasang salah satu daripadanya. Saya telah menggunakan skru plumbum dan bukannya pemacu tali pinggang untuk meningkatkan daya muat muatan. Saya belum memasukkan tutorial pemasangan kerana ia akan berubah mengikut beban yang ingin anda bawa. Bagi saya beban pada kelajuan maksimum adalah sekitar 14Kg.
Plat penggerak dibina menggunakan kepingan frp, akrilik juga boleh digunakan. Rangka keluli tahan karat dibina untuk menyokong lembaran frp.
Rangka dayung
Rangka paddle terdiri daripada keluli tahan karat. Keluli tahan karat adalah kalis air dan dengan itu akan menahan kakisan. Bahagian persegi 2 x 2 cm digunakan untuk rangka dayung. Kerangka yang kukuh diperlukan kerana banyak beban siklik akan bergerak di dayung semasa penghasilan gelombang. Kerangka keluli tidak akan membengkok dan dengan itu akan menghasilkan gelombang sinusoidal biasa.
L-clamp khas dibuat untuk menghubungkan plat penggerak dengan plat gantry pada sistem vslot.
Langkah 7: Manupalasi Karakteristik Gelombang



Tangki boleh menghasilkan ketinggian gelombang yang berbeza mengikut keperluan. Untuk menghasilkan ketinggian gelombang yang berbeza RPM motor disesuaikan. Untuk mendapatkan ketinggian gelombang besar RPM motor dinaikkan ini juga mengurangkan gelombang gelombang. Perumpamaan untuk meningkatkan panjang gelombang RPM motor menurun. RPM dapat disesuaikan dengan memilih pilihan RPM khusus dari menu.
RPM maksimum = 250
RPM minimum = 50
Berikut adalah contoh ketinggian gelombang yang berbeza seperti yang direkodkan oleh pecutan. Gambar pertama adalah data yang dirakam pada RPM tinggi akibatnya kita mendapat ketinggian gelombang tinggi. Gambar kedua menunjukkan penurunan ketinggian gelombang dan panjang gelombang graf yang meningkat yang merupakan data yang direkodkan oleh pecutan dan mewakili ciri gelombang sebenar gelombang yang dihasilkan.
Langkah 8: Sambungan dan Program Elektronik

Semasa menyambungkan bekalan kuasa, berhati-hati polaritas sambungan menyambungkan terminal positif ke positif dan negatif ke negatif. Buat sambungan untuk motor dan pemacu seperti yang ditunjukkan dalam gambar. Setelah semua sambungan dipasang pin mikrokontroler yang betul (8, 9, 10, dan 11) kepada pemandu motor stepper. Sambungkan mikrokontroler ke PC dengan USB. Mulakan Arduino IDE> Monitor bersiri.
Program ini termasuk dalam tutorial dan cukup jelas bahawa ia menggunakan suis dan jika ada pernyataan untuk beroperasi. Sangat mudah seorang pelajar sekolah menengah juga dapat memahaminya.
Berikut adalah pautan pemacu google ke program
Program kawalan Arduino
Langkah 9: Mengawal Penggerak oleh Program Berdasarkan Menu

Setelah mikrokontroler disambungkan dengan betul ke PC, anda akan menyukai menu yang serupa. Untuk memilih pilihan, ketik nombor di sebelah pilihan dan tekan enter
Contoh: -
Untuk memilih "Aktifkan pada frekuensi maksimum" jenis 1 dan tekan enter.
Untuk menghentikan tindakan jenis 0 dan tekan enter.
Hentian kecemasan
Untuk menghentikan penggerak tekan sifar "0" dan masukkan.
Untuk menghentikan kecemasan sama ada tekan semula pada mikrokontroler atau putuskan bekalan kuasa.
Langkah 10: Cara Mengendalikan Tangki Gelombang

Tangki ini dibuat sebagai sebahagian daripada projek utama saya. Tangki ini telah diuji untuk menghasilkan gelombang biasa yang berbeza dalam keadaan laut kepala untuk model tongkang berskala. Ujian flume gelombang berjaya. Kos keseluruhan untuk pembangunan projek ini adalah Rs. 81, 000 (Lapan Puluh Satu Ribu Sahaja) dalam jangka masa dua bulan.
Untuk sebarang pertanyaan sila komen.

Hadiah Pertama dalam Peraduan Air
Disyorkan:
Rectifier Gelombang Penuh Gelombang (JL): 5 Langkah
: 5 Langkah")
Full Wave-Bridge Rectifier (JL): PendahuluanLaman yang sukar dipahami ini akan membimbing anda melalui semua langkah yang diperlukan untuk membina penerus jambatan gelombang penuh. Ia berguna dalam menukar arus AC ke arus DC.Bahagian (dengan pautan pembelian) (Gambar bahagian disertakan dengan kaitan
Pantau Galon Tangki Minyak Pemanasan Dengan Makluman E-mel, SMS, dan Pushbullet: 9 Langkah (dengan Gambar)
")
Pantau Galon Tangki Minyak Pemanas Dengan E-mel, SMS, dan Makluman Pushbullet: MAKLUMAT KESELAMATAN: Sekiranya ada yang ingin mengetahui sama ada " ini selamat dibina / dipasang " - Saya telah membawanya ke 2 syarikat Minyak yang berbeza untuk maklum balas / keselamatan, dan saya telah menjalankannya oleh Wakil Pencegahan Kebakaran jabatan pemadam kebakaran
8 Kawalan Relay Dengan Penerima NodeMCU dan IR Menggunakan Aplikasi Jauh dan Android WiFi dan IR: 5 Langkah (dengan Gambar)
")
8 Kawalan Relay Dengan Penerima NodeMCU dan IR Menggunakan Aplikasi Jauh dan Android WiFi dan IR: Mengendalikan 8 suis relai menggunakan penerima nodemcu dan ir melalui aplikasi wifi dan jauh dan android. Alat kawalan jauhnya tidak bergantung pada sambungan wifi. DI SINI ADALAH KLIK VERSI YANG DIKEMASKINI SINI
Tangki Raspberry Dengan Antara Muka Web dan Streaming Video: 8 Langkah (dengan Gambar)
")
Tangki Raspberry Dengan Antara Muka Web dan Penstriman Video: Kami akan melihat bagaimana saya telah menyedari sedikit Tangki WiFi, yang mampu melakukan Kawalan Web jarak jauh dan Streaming Video. Ini bertujuan untuk menjadi tutorial yang memerlukan pengetahuan asas mengenai pengaturcaraan elektronik dan perisian. Atas sebab ini saya ' telah memilih
Antena Gelung Resonan Gelombang Siaran AM Gelombang Sederhana .: 31 Langkah

Antena Gelung Resonan Gelombang Siaran AM Gelombang Sederhana: Antena gelung gelang siaran Medium Gelombang (MW) AM. Dibina menggunakan kabel 'ribbon' telefon 4 pasang (8 wayar) yang murah, & (pilihan) ditempatkan di selang plastik pengairan 13mm (~ setengah inci) taman murah. Versi sokongan diri yang lebih tegar lebih sesuai dengan