
Isi kandungan:
- Pengarang John Day day@howwhatproduce.com.
- Public 2024-01-30 11:12.
- Diubah suai terakhir 2025-01-23 15:01.

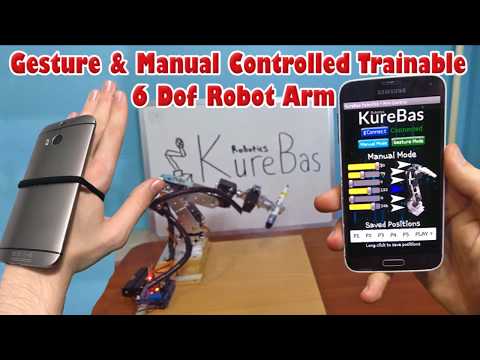
Terdapat dua mod di Lengan.
Pertama ialah Manual Mode yang boleh anda gerakkan lengan dengan bluetooth di telefon bimbit anda dengan menggerakkan slider pada aplikasi. Pada masa yang sama, anda dapat menyimpan kedudukan anda dan anda boleh bermain…
Kedua ialah Mod Gerakan yang menggunakan Sensor Oriantasi dan Sensor Kedekatan telefon anda. Apabila mereka diubah, aplikasi mengirimkan perintah ke arduino…
KureBasArm - Ini adalah satu lagi langkah untuk robot baru KureBas v 3.0
Langkah 1: Bahan Terpakai

6 Lengan Robot DOF Set $ 35
Servo Logam 6x MG996r $ 30
Perisai Servo 16 Saluran $ 9
Modul Bluetooth HC-06 $ 2.50
2x 18650 Bateri Li-ion $ 11.50
Pemegang Bateri 2x 18650 $ 2
JUMLAH KOS: $ 90
Langkah 2: Cara Menyiapkan Lengan Robotik


Langkah 3: Pengekodan


Anda boleh mendapatkan semua fail dalam pautan ini (kod dan aplikasi)
drive.google.com/open?id=1JejPVpk6yYxPe6gNJJ5ALI4ptvwR07aD
Langkah 4: Aplikasi Telefon

Saya membuat aplikasi dari pencipta MIT APP 2
Disyorkan:
DIY -- Cara Membuat Robot Labah-labah Yang Boleh Dikendalikan Menggunakan Telefon Pintar Menggunakan Arduino Uno: 6 Langkah

DIY || Cara Membuat Robot Labah-labah Yang Boleh Dikendalikan Menggunakan Telefon Pintar Menggunakan Arduino Uno: Semasa membuat robot Labah-labah, seseorang dapat mempelajari banyak perkara mengenai robotik. Seperti membuat Robot adalah Menjamu dan juga mencabar. Dalam video ini kami akan menunjukkan kepada anda bagaimana membuat robot Spider, yang dapat kami gunakan menggunakan telefon pintar kami (Androi
Lengan Robot DIY Python yang Boleh Diprogram: 5 Langkah

Lengan Robot DIY Python yang Boleh Diprogram: Mengapa Melakukan Projek Ini: (a) Belajar untuk mengawal lengan robot dengan benar-benar menulis kod Python. Ini akan memberi anda kawalan yang paling terperinci sambil menambahkan pengaturcaraan komputer ke tali pinggang anda dan mempelajari cara kerja dalaman motor berdasarkan daftar canggih
4 Robot Lengan Mekanik DOF Dikendalikan oleh Arduino: 6 Langkah

4 Robot Lengan Mekanik DOF Dikendalikan oleh Arduino: Baru-baru ini saya membeli set ini di aliexpress, tetapi saya tidak dapat menemui arahan, yang sesuai dengan model ini. Jadi akhirnya membinanya hampir dua kali dan melakukan banyak eksperimen untuk mengetahui sudut pemasangan servo yang tepat. Dokumentasi yang munasabah adalah dia
Hawk Gesture: Robot Dikendalikan Gerak Tangan menggunakan Antaramuka Berdasarkan Pemprosesan Imej: 13 Langkah (dengan Gambar)
")
Gesture Hawk: Robot Dikendalikan Tangan Menggunakan Antaramuka Berasaskan Pemprosesan Imej: Gesture Hawk dipamerkan di TechEvince 4.0 sebagai antara muka manusia-mesin berasaskan pemprosesan gambar. Kegunaannya terletak pada hakikat bahawa tidak ada sensor tambahan atau yang boleh dipakai kecuali sarung tangan yang diperlukan untuk mengawal kereta robot yang berjalan pada
Cara Membangun Robot Jejak Lengan Gripper Dikendalikan Melalui Nrf24l01 Arduino: 3 Langkah (dengan Gambar)
")
Cara Membina Robot Lacak Lengan Gripper Dikendalikan Melalui Nrf24l01 Arduino: Arahan " Cara Membangun Robot Lengan Lengan Gripper Dikendalikan Melalui Nrf24l01 Arduino " akan menerangkan bagaimana membina lengan gripper kebebasan tiga darjah yang dipasang pada roda roda trek yang digerakkan oleh modul L298N pemacu motor berkembar menggunakan MEG